| Siguiente: Conclusiones y trabajo a Superior: Dispositivo KURT, KU Tiempo Anterior: Dispositivo KURT |
KURT 2.0. periodic
se corrio para generar 300 iteraciones. Cada Iteración
requirió 600 microsegundos con periodo de 1 milisegundo. Se
corrio en el modo rt-2, el cual permita tener procesos de RT y
normales al mismo tiempo. Esta prueba se corrió varias veces
con resultados similares.
El comando usado fué:
periodic 1 600 300 1 ./ rt-2 1000
A continuación vamos a observar el comportamiento de KURT,
usando llamados a sistema, en cuanto a su capacidad de
ejecutar tareas en un periodo prederminado. Idealmente todas
las tareas deberían ejecutarse con un espacio de 1
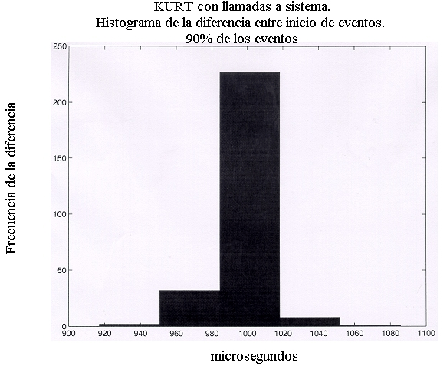
milisegundo entre inicio de tareas. Es decir que un histograma
de la diferencia en microsegundos entre eventos consecutivos
contra la frecuencia ese número de microsegundos, deberiamos
obtener una línea vertical en 1 milisegundo con una
frecuencia de 300.
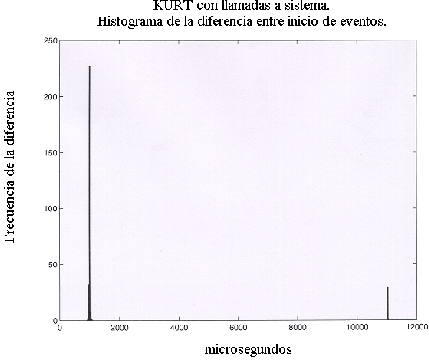
En la figura 3 podemos observar que de los 300 eventos programados a ocurrir en intervalos de 1 milisegundo la mayoría, 90 % aproximadamente, estuvieron alrededor del milisegundo. Sin embargo, el 10 % restante se ejecutó con retardos de hasta 10 milisegundos. El comportamiento de ese 10 % se muestra en la figura 4.
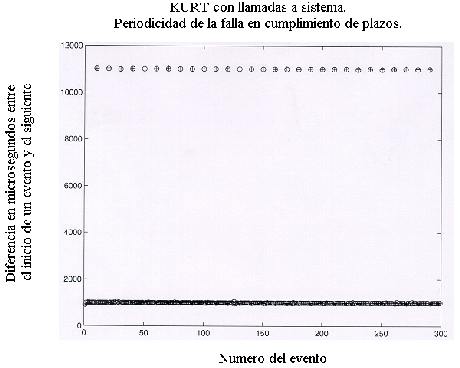
Ahora es importante analisar la periodicidad de los eventos desde una perspectiva temporal y no un histograma.Es importante que notar que los plazos fallados son periódicos. Este comportamiento se aprecia en la Figura 5. La razón para este mal comportamiento es todavía una incognita para nosotros.
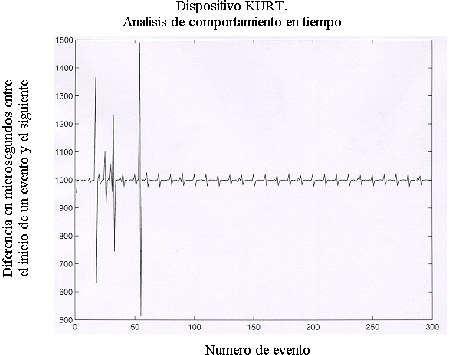
La desaparición de esos picos alrededor de los 10 milisegundos es una gran ventaja, ya que ahora sabemos a pesar de que habrá una variación esta no será de la magnitud que se tenia antes.
Con la intensión de comparar el comportamiento de ambas versiones en el eje temporal se ha incluido la figura 7. En esta figura podemos observar que la variación de los plazos alrededor del milisegundo es mucho menor usando el dispositivo KURT que usando la versión con llamados a sistema, vease la figura 5. Es importante notar que en la gráfica de tiempo se presentan oscilaciones en el inicio y se estabilizan.